
精密位移台运动系统的技术参数介绍
 精密位移台运动系统的技术参数介绍
精密位移台运动系统的技术参数介绍
任何位移台都有 6 个自由度:3 个分别沿着 x、y、z 轴方向的平移自由度,另外 3 个则是围绕 x、y、z 轴的旋转自由度(如图 1)。
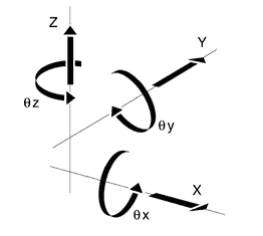
图 1 右手坐标系显示 6 个方向的自由度
此处描述的所有运动都是关于右手坐标系的,所有的运动都可以看成是由沿坐标轴方向的平动和绕坐标轴方向的转动的复合运动。
当选择一款专业的位移台时,需要考虑很多不同评定位移台性能的指标。了解各种各样参数的定义以及他们如何影响运行结果将简化产品的选择过程。
1. 分辨率 Resolution
分辨率是指移动系统可以分辨的最小位置增量,它不同于系统的最小控制增量。同样涉及到显示器和数据采集器的分辨率,通常取决于编码器的输出,但由于滞后、背隙等导致传动系统的降低,因而大多系统的最小移动增量都不等于分辨率,除非编码器直接测量传动。
(1)对于电动平移台而言,分辨率为步进电机每转动最小的一步,位移台的运动输出量。
电动平移台的分辨率可以用以下公式计算:
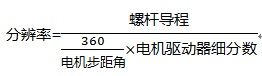
例如:螺杆导程是 4mm,电机的步距角是 1.8º,驱动器设置为 20 细分,则分辨率是0.001mm。
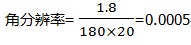
(2)电动旋转台的角分辨率可以用以下公式计算:

例如:电机的步距角是 1.8º,传动比是 180:1,驱动器设置为 20 细分,则角分辨率是0.0005º。
2. 灵敏度 Sensitivity
能产生一个输出运动的最小输入,通常用来表征手动位移台,也可以定义为输入驱动和输出运动的比值,这个术语经常和分辨率混淆。
3. 精度 Accuracy
对于一个给定的输入,实际位置和理想位置之间的最大差距。运动系统的精度跟实际位置的测量方式有很大的关系,所以对于开环设备中精度并不是一个很有意义的参数。
4. 绝对精度 Absolute Accuracy
绝对精度是指系统针对命令输入或理想输入的输出,更直观的说应该叫不确定度。当要求一个运动系统精确运动 10mm,而实际上只运动了 9.99mm,则不确定度是 0.01mm。位移台的轴线和测量尺的轴的角度误差会导致一个与角度呈余玄关系的单调递增误差,这就是常说的余玄误差。
5. 精确度 Precision
精度是指对相同输入,覆盖 95%运动偏移的变化输出位置的变动范围。精确度也叫重复定位精度。精度和精确度是不同的概念。
6. 重复定位精度 Repeatability
重复定位精度是指移动系统多次可到达一个既定点的能力。通常所说的重复定位精度指的是单向重复定位精度,单向重复定位精度是指运动系统仅在一个方向上做重复增量运动。这个参数避开了系统的空回和滞后。
因此一个更重要的定义是双向重复定位精度,即无论运动方向多次尝试达到一个严格意义点的能力。
7. 空回 Backlash
空回是指不至引起反向可测量输出的最大输入量。轴向预紧不够或传动链元件的啮合不好会导致空回,例如啮合齿轮上的齿不好。空回是相对稳定的,并且可以用好的控制器补偿。
8. 误差 Error
误差是指实测的品质参数和理想的/需要的结果之间的差值。误差主要有两个方面:轴向误差,如精度,与沿着运动方向的参数有关;非轴向误差,如倾斜,与约束的自由度方向相关。
9. 偏心和摆动 Eccentricity and Wobble
偏心有时也称同心度,旋台的偏心是指当旋台旋转时它的旋转中心与平均位置的偏差。
如果一个旋台是绝对同心的,那么在旋转时就没有偏心。对于旋台,摆动是旋转轴的角度偏差。
10. 跳动 Runout
跳动是指非轴向线性误差。这是位移台的理想直线运动和实测直线运动之间的偏差。跳动有两个正交分量:表征水平方向偏差的直线度和表征垂直方向偏差的平面度。
11. 倾斜和晃动 Tilt and Wobble
倾斜和晃动是指非轴向角度误差。它是指理想的运动直线和实测的运动台之间的偏移量。倾斜和晃动有三个相互垂直的分量,一般指的是转动、俯仰和偏摆。这三个分量决定了由几何形状引起的所有运动系统误差。
12. 负载能力 Load Capacity
对于位移台来说,负载能力是指所允许的作用于位移台台面中心且与运动方向和工作台面垂直的合力的大小。对于旋转台来说,合力的方向是沿着旋转轴的。若负载不在工作台的中心,则负载须适当减少。
13. 法向负载能力 Normal Load Capacity
法向负载能力是指可直接作用于移动台面上中心的最大负载,负载量主要受限于工作台轴承所能承受的负载能力。
14. 横向负载能力 Transverse Load Capacity
横向负载能力也叫侧面负载能力,是作用于垂直运动方向轴线且沿着工作台面的最大的负载力,通常受限于轴承的负载力,并且由于几乎没有轴承承载,因而比法向负载力能力要小。
15. 轴向负载能力 Axial Load Capacity
传动方向上的最大负载,对于竖直安装的线性位移台,标称的垂直载重能力经常由轴向负载能力所限制。更多时候轴向负载能力取决于电机和螺杆的负载能力。
16. 动态负载 Dynamic Load
动态负载是指静态负载和运动阻力的总和。需要考虑的负载的一些动态特性包括摩擦力和惯性。由于动态载荷限制了系统所能达到的最大加速度,因此在评价整个运动系统性能时,必须要考虑此因素。
17. 速度 Velocity (Speed)
速度是指单位时间内位移的改变量。最大速度是指位移台正常负载情况下的最大速度。
负载越轻速度越快。最小稳定速度主要依赖于运动系统驱动设备的速度稳定性。
18. 速度稳定性 Speed Stability
速度稳定性是指保持恒定速度的能力,也用速度调节能力表征。这个参数取决于平台的机械设计、反馈机制、所用的控制算法和速度的大小。
19. 加速度 Acceleration
加速度是指单位时间内速度的变化量。
20. 惯量 Inertia
惯量是负载抵抗速度改变的一个量度。惯量性越大,负载加速或减速时需要的转矩也越大。惯量是一个负载大小和形状的函数。如果能对转矩做出限制,那么允许加速和减速的次数就会增加。
 闽公网安备35020602000126号
闽公网安备35020602000126号